IndexFiguresTables |
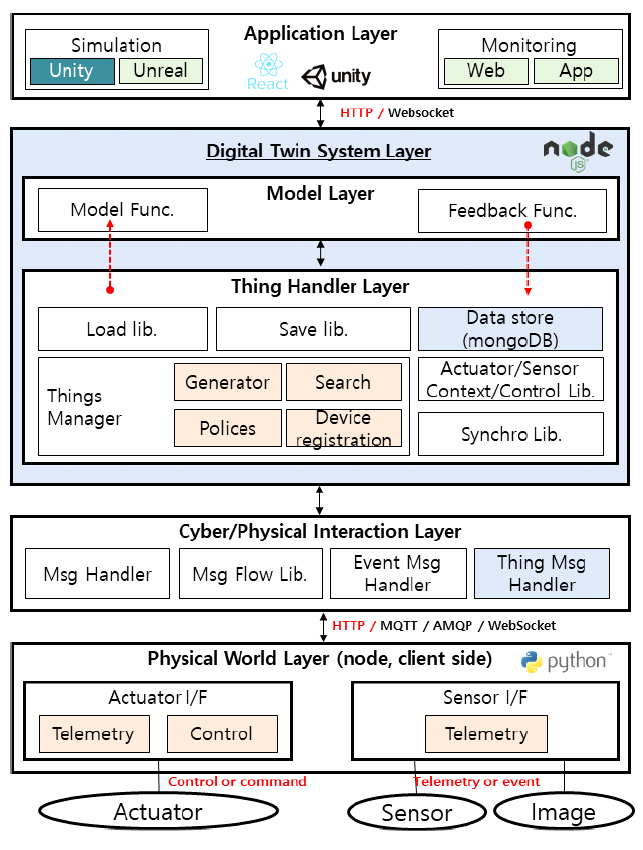
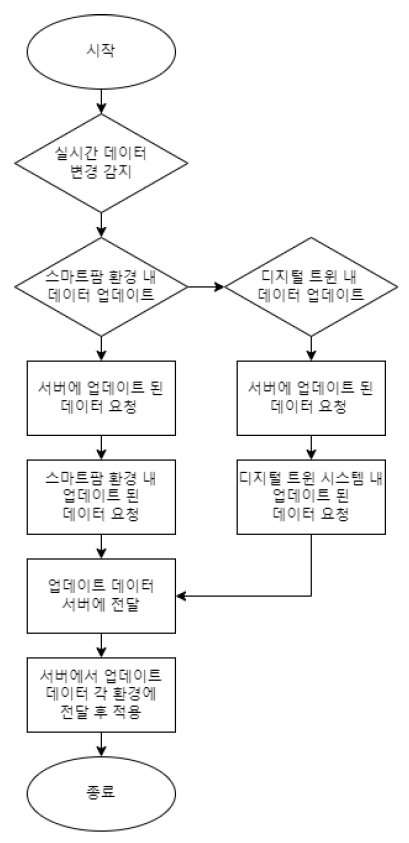
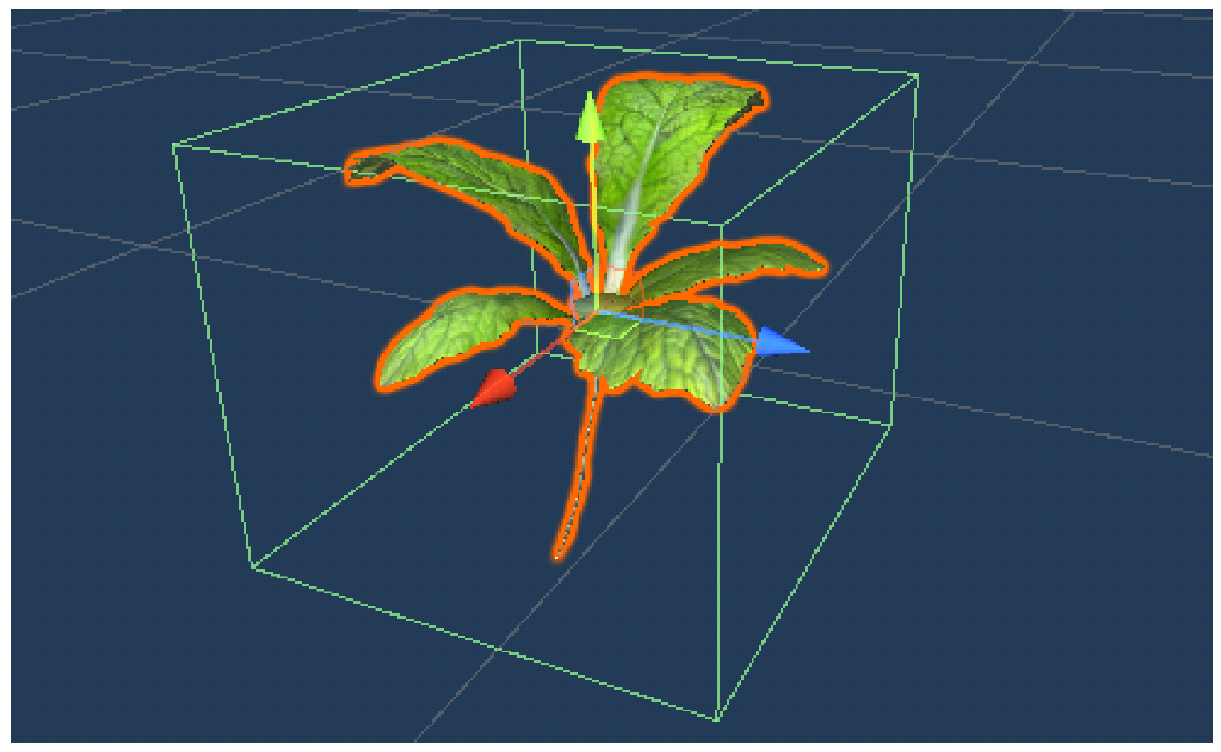
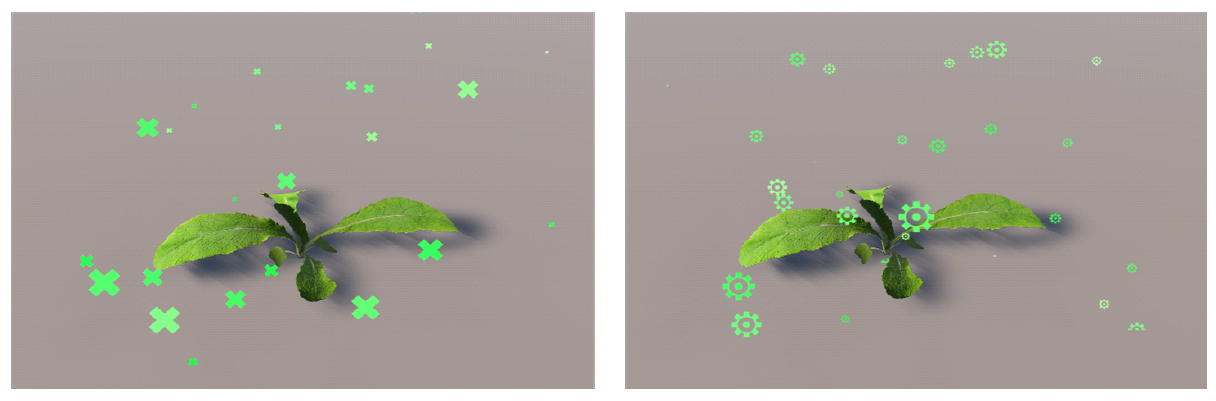
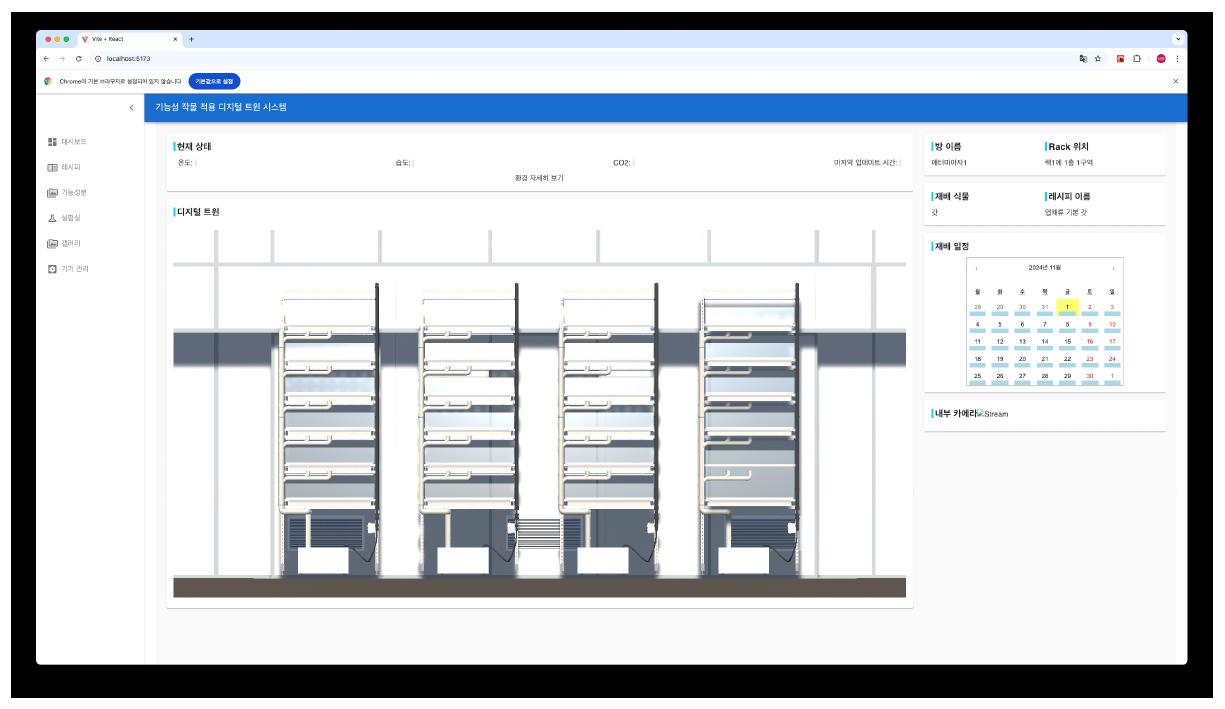
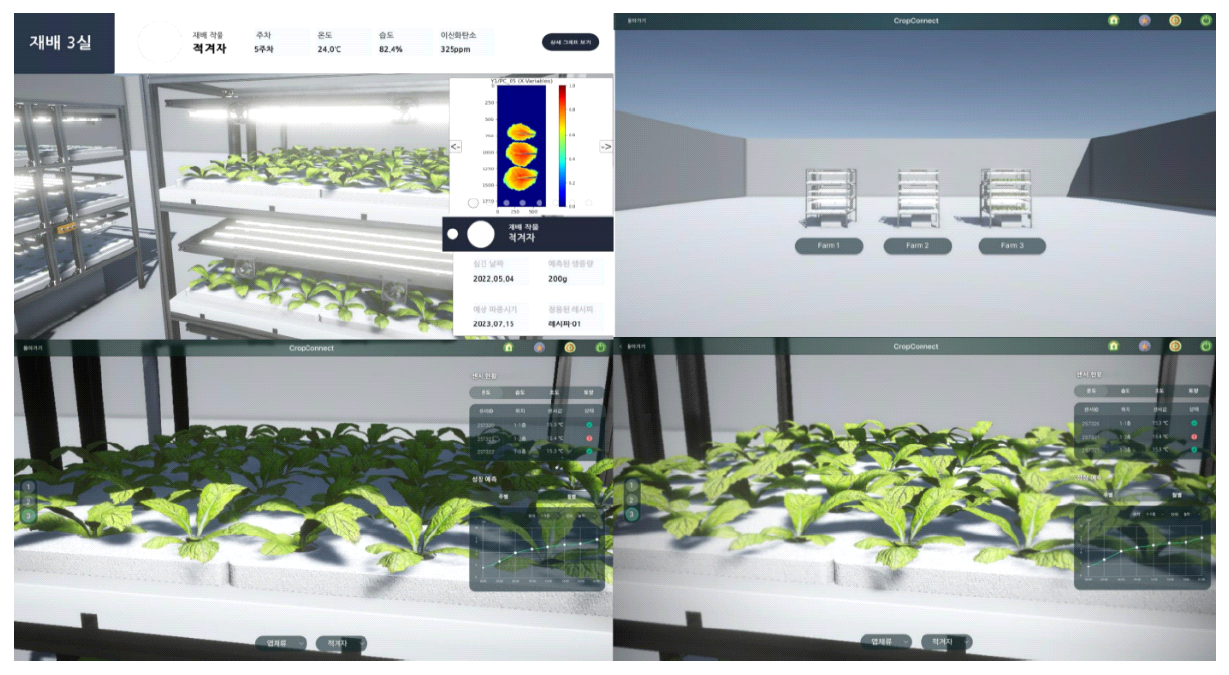
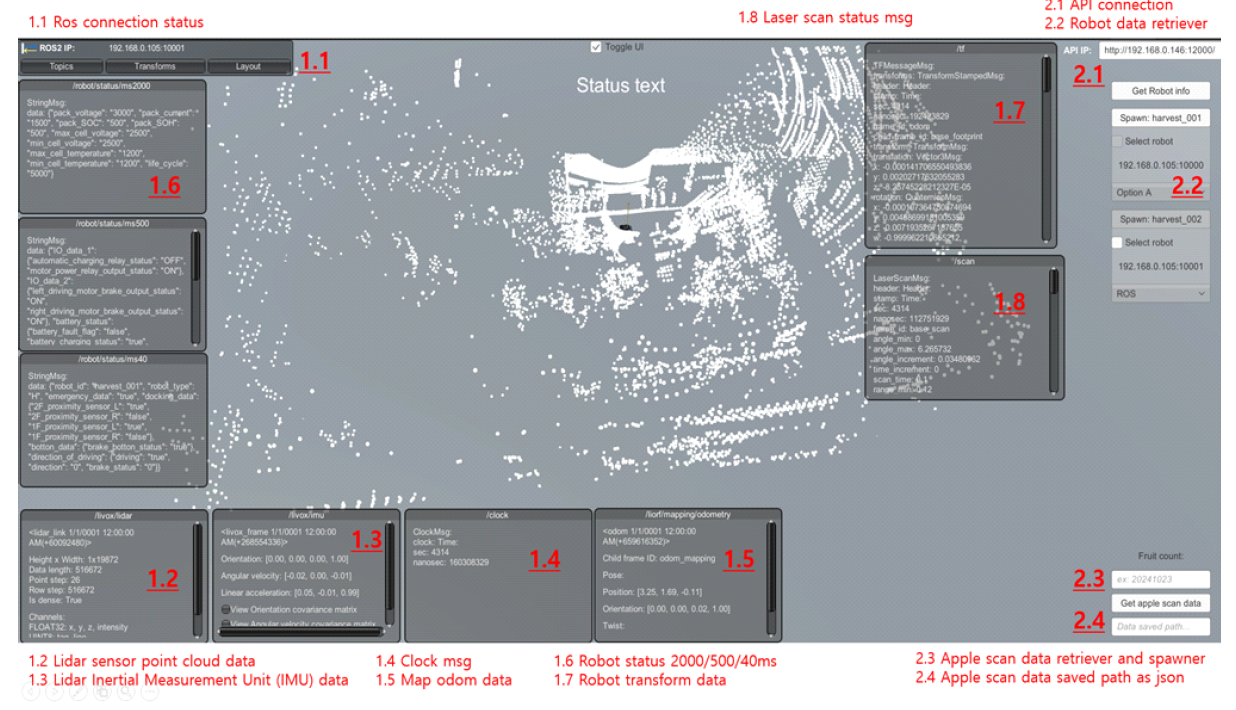
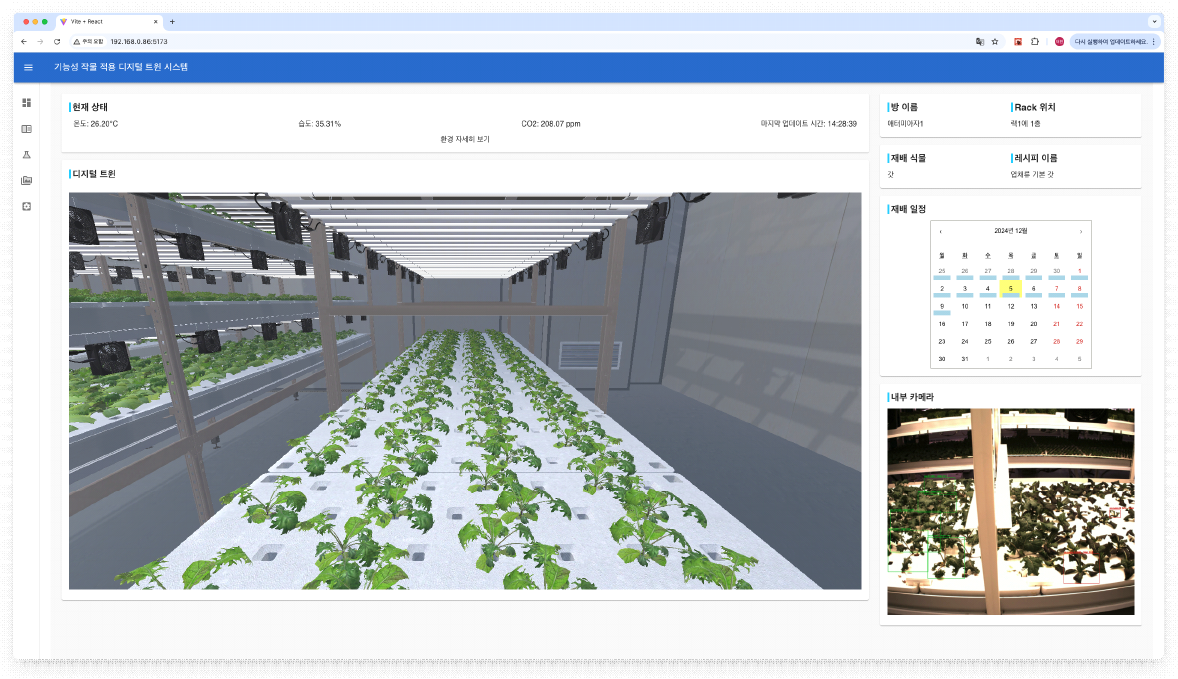
Donghee Noh♦° , Hea-Min Lee* and Tae-Hwan Ko**Implementation of a Digital Twin System for Synchronization Between Cyber and Physical Smart FarmsAbstract: In this study, a digital twin system architecture that can manage a smart farm environment in a virtual environment was proposed, and an example of its application to a real farm was described. The proposed system was designed with a focus on real-time synchronization, modelling and simulation, and ensuring reproducibility, and was divided into a physical layer, an interaction layer, a digital twin system layer, and an application layer. This system was verified through demonstration on farms in Chungcheongnam-do. Keywords: Smart farm, Digital twin, Synchronization, Autonomous, Autonomous control 노동희♦°, 이혜민*, 고태환**사이버 및 물리적 스마트 팜 간 시스템 동기화를 위한 디지털 트윈 시스템 구현요 약: 본 연구는 스마트팜 환경을 가상환경에서 관리할 수 있는 디지털 트윈 시스템 아키텍처를 제안하고 이를 실제 농가에 적용한 사례를 기술하였다. 제안된 시스템은 실시간 동기화, 모델링 및 시뮬레이션, 재현성 확보를 중점으로 설계되었으며, 이를 Physical Layer, Interaction Layer, Digital Twin System Layer, Application Layer로 세분화하였다. 본 시스템은 충청남도의 농장에서 실증을 통해 활용 가능성을 검증하였다. 키워드: 스마트팜, 디지털 트윈, 동기화, 무인화, 자율작업 Ⅰ. 서 론스마트 농업(Smart arm)은 전통적인 농업 방식에서의 한계를 극복하기 위한 첨단 농업 기술 중 하나로 인식되고 있다. 관행 농업 방식과는 달리 밀폐된 공간을 벗어나 실내외 다양한 형태의 다단형 재배단에서 작물을 다층 구조로 대량 재배함으로써 공간 효율성을 극대화하고 외부 환경의 요인을 최소화하여 생산성을 극대화할 뿐 아니라 병해를 최소화할 수 있는 농업기법으로 인식되고 있다[1]. 특히 물 사용량과 농약 사용을 최소화할 수 있으며, 연중 내내 안정적인 작물생산이 가능하다는 점에서 도시의 식량 안보를 강화할 수 있는 중요한 기술로 부상하고 있다[2]. 최근 이러한 점에서의 운영 효율성 극대화와 농업의 디지털 혁신을 가져오는 방법의 하나로 디지털 트윈 (Digital Twin) 기술을 적용하는 사례가 증가하고 있다[3]. 디지털 트윈 시스템은 물리적 시스템, 제품, 또는 프로세스를 복제하여 실제 시스템 단위에서 발생하는 데이터를 실시간으로 수집, 분석하고 이를 모형화하여 가상 환경에서 이를 기반으로 다양한 시나리오를 생성, 시뮬레이션할 수 있다[4]. 디지털 트윈 시스템은 스마트 제조, 건설, 물류, 헬스케어 산업뿐만 아니라 농업 분야에서 다양하게 연구되고 있다[5-7]. 본 논문에서는 관련 서론을 기술한 뒤, 2장에서는 디지털 트윈 시스템에서 제안한 시스템 아키텍처에 관하여 기술하였으며, 3장에서는 구현 사례에 관하여 기술하였다. 마지막으로 연구 결과 및 향후 연구계획에 관하여 기술하였다. Ⅱ. 시스템 아키텍처본 장에서는 스마트 농업에 일반적으로 적용할 수 있는 디지털 트윈의 아키텍처 구현 방법에 관하여 기술한다. 본 장에서 기술하는 디지털 트윈 아키텍처 구현 방법은 크게 1) Physical Layer, 2) Interaction Layer, 3) Digital Twin System Layer 및 4) Application Layer의 총 4단계로 구분하여 설계하였다. 이에 대한 개념도는 아래 그림과 같다. 2.1 Physical LayerPhysical Layer 계층은 실제 환경과 관련한 DB 수집 및 환경제어가 실시간으로 동작하여야 한다. 이를 위해 PLC Controller 제어시스템을 구현하고, 이를 관리하기 위해 카메라를 이용한 모니터링 시스템으로 구현하였다. 이때 Modbus TCP 통신을 활용하여 데이터에 대한 실시간 수집 및 다양한 환경제어 시스템을 제어할 수 있다. PLC Controller를 통해 측정이 가능한 데이터는 온도, 습도, CO2가 있으며, 제어가 가능한 요소는 관개, LED, 습도, FAN, 수조, CO2 공급 등이 있다. 모니터링 시스템은 이동식과 고정식 카메라 기반으로 실시간 측정이 가능하도록 구현하였다. 본 연구에서는 공간 내 설치된 재배단 중 한 구역을 대상으로 이동식 카메라를 설치하였으며, 사용된 모델은 U3-36L0XC 제품을 사용하였다. 이를 통해 재배되는 작물에 대하여 주차별 생육 과정에 대하여 다양한 시각으로 모니터링 가능하도록 구현하였다. 고정식 카메라의 경우 총 6대를 설치하였으며, 측면 및 상단 부분에서 동일 작물을 측정할 수 있도록 설치하였다. 이를 통해 작물의 전반적인 생육 상태를 다양한 각도에서 지속 관찰할 수 있도록 설계하였다. 이때 측면에 설치된 카메라의 용도는 수평적으로 식물의 형태와 크기 변화를 기록하는 데 사용되었으며, 상단에 설치된 카메라는 작물 성장에 대한 입체적 측면에서 데이터 수집이 가능하도록 설치하였다. 이에 대한 구현 결과는 아래 그림(그림 3)과 같다. 그림(Fig.) 3. 식물공장 내부 기기(카메라)와 디지털 트윈 시스템 간의 상호작용 인터페이스 (Interaction Interface Between Internal Equipment (Cameras) and the Digital Twin in the Plant Factory) 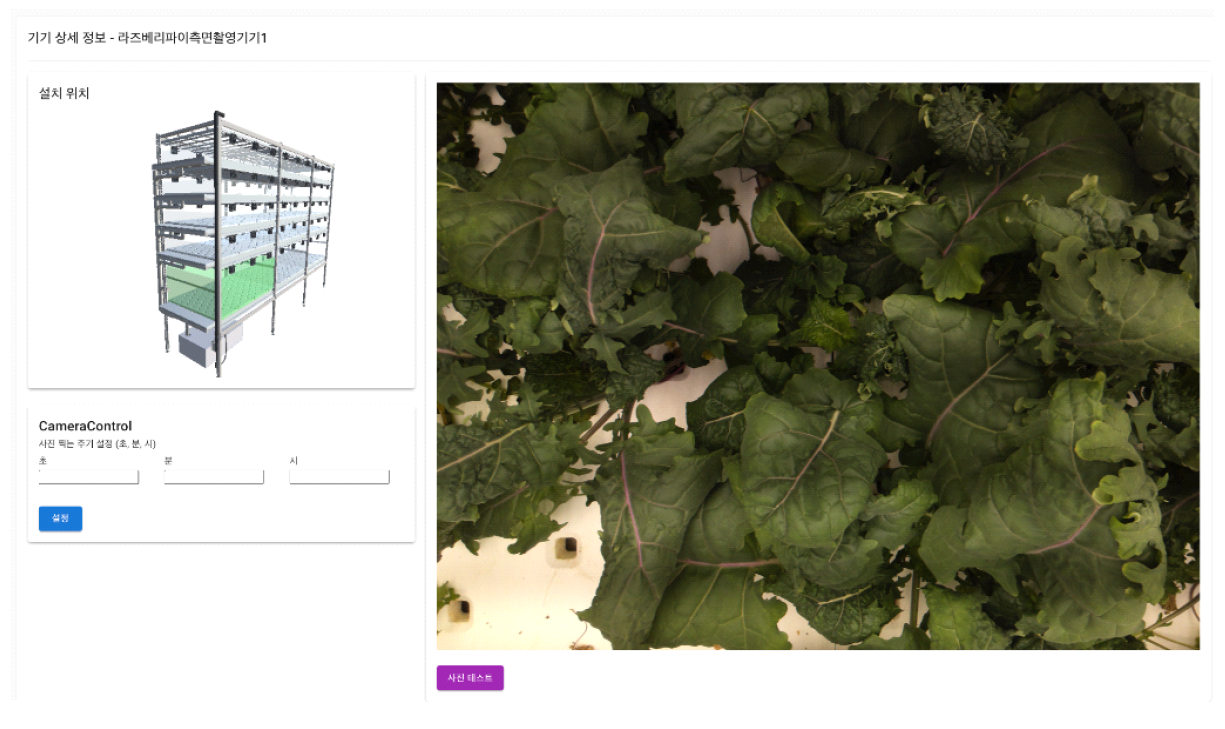 2.2 Interaction LayerInteraction Layer 계층은 실제 환경에 센서가 새롭게 설치될 시 이를 자동으로 인식 및 정보를 갱신할 수 있는 동적 시스템 등록 절차 기능을 구현하였다. 시스템 등록 절차의 경우 디지털 트윈 시스템과 실제 환경에 새롭게 설치된 IoT 기기가 사전에 설정한 동일 네트워크 망에 연결될 시 디지털 트윈 시스템으로 해당 IoT 기기의 특정 URL에 접속, 기기 정보를 자동으로 조회한 뒤 해당 기기를 자동으로 등록하는 절차로 구현하였다. 상세하게는 IoT 기기 내에는 Django, Node, Spring 등 서버 프로그램이 설치되며, 기기 내에는 사전에 정의된 URL을 통해 HTTP GET 요청 시 IoT 기기의 정보가 실시간으로 조회되도록 구현하였다. 디지털 트윈 시스템에서는 이를 바탕으로 동일 네트워크에 IoT 기기가 인식될 시 해당 기기의 정보를 실시간으로 탐색하게 되며, 조회된 기기의 IP 정보와 연결된 URL 정보를 결합하는 방식의 API를 설계하여 Interaction Layer에 적용하였다. 이때 디지털 트윈 시스템을 통해 연결된 정보가 본 시스템에 등록 대상 기기 유무를 판단하게 되며, 이를 통해 최종적으로 IoT 기기의 동적 등록 절차가 진행된다. 2.3 Digital Twin System LayerDigital Twin System Layer 계층은 실제 환경에 데이터를 관리하고 호출하는 기능을 자동화할 수 있는 기능을 포함하며, 특히 시스템 정보 갱신 시 이를 자동으로 인식, 업데이트할 수 있는 동적 시스템 업데이트 절차를 포함한다. WebSocket 통신 방식을 통해 실시간으로 환경정보 및 IoT 기기의 제어 등 정보가 포함된 데이터를 전달하는 절차와, WebSocket 통신 방식을 통해 서버에 등록된 IoT 기기에 대한 데이터 업데이트를 확인하면 HTTP 통신을 통해 변경된 데이터를 서버에게 요청하여 실시간으로 환경 구성 및 수집 정보를 업데이트하는 절차로 구현하였다. 이에대한 상세 구현방법은 아래와 같다. 1) 디지털 트윈 서버 내 실시간 연동을 위해 서버의 API 키를 추가하고, 서버 연동 시 HTTP 통신을 통해 서버에 데이터를 요청하게 된다. 2) 디지털 트윈 서버로부터 데이터 요청이 성공하면 Json 형태로 데이터를 호출받게 되며, 이때 IoT 기기 정보 및 환경 정보 등을 초기화하게 된다. 3) 데이터 추가 및 삭제 등 업데이트가 확인 시 Http 통신을 통해 업데이트 내용 확인 후 업데이트하게 되며, 디지털 트윈 시스템 서버 내에서 IoT 센서 제어 시 WebSocket 통신을 통해 제어한 IoT 센서를 서버에서 디지털 트윈 환경으로 전송하게 된다. 이에 대한 그림은 그림 4와 같다. 2.4 Application LayerApplication 계층은 실환경에서 수집된 데이터를 시각화하기 위한 기능 구현에 대하여 설명한다. 실환경 정보를 가상환경으로 표현하기 위해 본 장에서는 게임에서 사용되는 3D Unity 엔진을 활용하였다. 또한 사업성을 고려할 때 웹 환경에 최적화된 구조로 구현하기 위해 webGL 라이브러리를 사용하여 Application 계층을 구현하여 웹 환경 내에 시스템을 통합하였다. 더 상세하게는 Node.js 기반의 Express 라이브러리를 사용하여 Application 서버를 구현하였다. 해당 서버는 Crontab을 활용하여 주기적으로 데이터를 수집하도록 설정되었으며, 이는 일정한 간격으로 자동 실행되는 스크립트를 통해 이루어졌다. 수집된 데이터는 서버에서 필요한 전처리 과정을 거친 후, 클라이언트 측으로 전달되어 시각화를 위한 준비가 완료된다. 클라이언트 측에서는 React 프레임워크를 이용하여 웹 인터페이스를 구현하였으며, 이를 통해 사용자에게 실시간으로 갱신되는 데이터를 직관적이고 효과적으로 시각화하여 제공하였다. Unity 엔진을 활용하여 식물공장의 시각적 모델을 구축하고, 이를 통해 물리적 환경을 가상 환경으로 재현하였다. 이를 통해 사용자는 실제 식물공장의 작업 흐름과 환경 변화를 가상 환경에서 직관적으로 확인할 수 있었으며, 다양한 변수의 변화에 따른 영향을 시각적 분석할 수 있게 된다. 또한, 시각화된 모델을 웹에서 제공하기 위해 Unity 프로젝트를 WebGL로 빌드하여 웹에서 직접 실행될 수 있도록 구현하였다. 이를 통해 사용자는 별도의 설치 없이도 웹 기반으로 재배 환경을 등록, 운영할 수 있도록 재현성을 강조하였다. 디지털 트윈 시스템의 재현성을 높이기 위해서는 자연스러운 시뮬레이션 구현이 필수적이다. 이를 위해 작물 3D 모델링의 경계를 아래 그림 5와 같이 정의하고 충돌을 감지하는 컴포넌트 적용하였으며, 이는 디지털 트윈 환경에서 다양한 이벤트 기능 적용에 활용하였다. 디지털 트윈 구현 시 가상환경 내 모델에 대한 재사용성 강화를 위해 Prefab을 활용한 작물 3D 모델링을 설계하였으며, Prefab 기능은 오브젝트의 템플릿으로 사용되며, 이를 통해 작물에 대한 객체별 모듈화가 가능하다. 이를 통해 오브젝트를 쉽게 복제 및 관리할 수 있어 시스템 관리의 용이성, 재사용성 및 유지보수의 용이성이 크게 향상될 수 있다. 주로 생육 주차별 작물 및 재배단 위주로 모듈화하였으며, 이에 대한 결과는 그림 6과 같이 표현하였다. 그림(Fig.) 6. 생육 주차별 작물 성장 모델링 Prefab 구현 예시 (Functional ingredient crop growth modeling by each week Prefab) 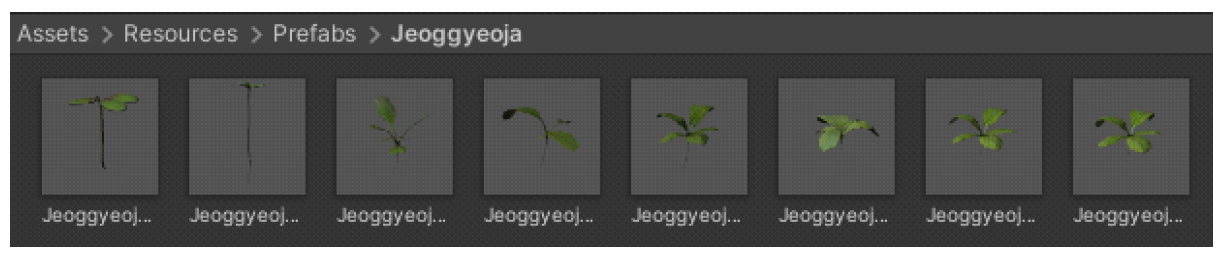 디지털 트윈에 적용되는 시뮬레이터 모델에 따라 작물에 대한 성분변화 또는 생육 예측 변화 등이 표현될 수 있다. 이를 위해 본 논문에서는 Particle을 활용하였으며, 아래 그림 7에서 보듯이 각 particle의 모양, 크기, texture 등을 정의한 뒤 이벤트, 트리거 등 발생 조건을 설정하여 작물 모델에 적용하였다. 디지털 트윈 재현성을 위해 재배단 내 재배되는 작물에 대한 생육 주차별 성장 변화를 시각적으로 표현하기 위해 Json 데이터를 기반으로 재배 작물과 마지막 주차를 확인하여 작물 생성 및 슬라이더 끝을 마지막 주차로 설계하였으며, 생육 주차별 작물은 슬라이더 바를 조작하여 시각적으로 확인할 수 있도록 설계하였다. 이에 대한 구현 결과는 그림 8과 같다. 그림(Fig.) 8. 주차별 작물 재배 정보 조회 결과 (Sliding-function based Crops Information Inquiry Results by each week) 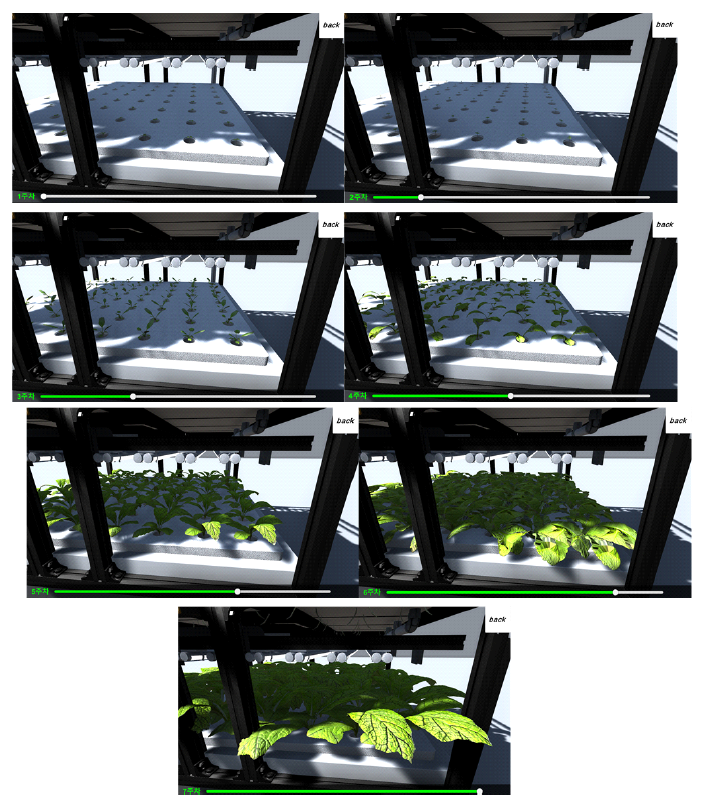 실내외 스마트팜 환경을 모사하기 위하여 그림 9, 10과 같은 실내환경과 그림 11과 같은 실외 환경을 모사한 환경을 생성하였다. Ⅲ. 구현 결과본 장에서는 시스템 아키텍처를 통해 구현된 디지털 트윈에 대한가시화 구현 결과에관하여 기술한다. 실제 환경은 충청남도에 소재하고 있는 E사에서 운영하는 30평 규모의 농장에서 설치하였다. 이에 대한 구현 결과는 아래 그림과 같다. 그림 12에서는 특정 재배 작물에 대해 주차별 생육 분석 결과가 디지털 트윈 화면에 시각화된 모습을 확인할 수 있으며, 이를 기반으로 3D 작물 개체가 렌더링되어 화면에 표시되었다. 이 때 이동식 자율주행 로봇을 활용하여 일정 간격으로 이미지를 촬영 및 저장함으로써, 디지털 트윈 시스템 내에서 타임랩스 형식으로 관찰할 수 있는 기능을 구현하였다(그림 12). 이때 자율주행 로봇을 이용하여 그림 16과 같이 데이터를 수집하게 되며 이러한 정보 역시 디지털 트윈 시스템으로 호출된다. 그림(Fig.) 12. 고정 카메라를 활용하여 타임랩스 형식으로 관찰할 수 있는 기능 (The functionality to observe in a time-lapse format using a fixed camera) 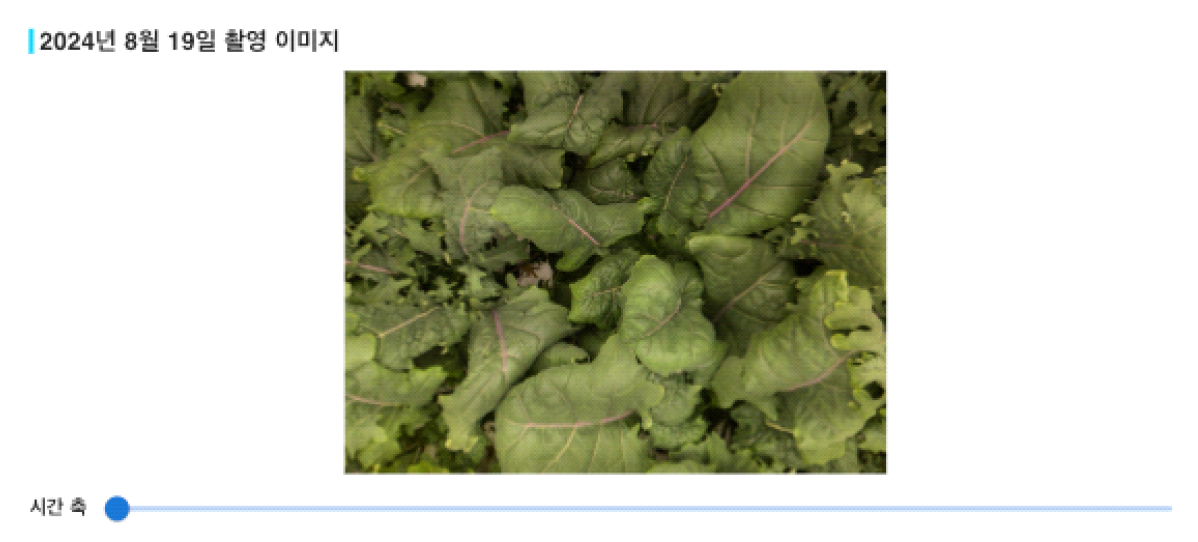 위의 결과를 통해 이전 재배 기간 동안 식물이 특정 재재배환경 조건에서 레시피 기반으로 성장했는지를 체계적으로 관측하고 기록할 수 있어, 이를 통해 농가에 유용한 정보를 제공할 수 있다. 그림 13에서는 레시피에 따른 재배 작물에 대한 최종 예상 생산량 및 생산량을 달성하는 데 필요한 개체수에 대하여 시뮬레이션할 수 있는 기능을 구현하였다. 이를 통해 관리자는 본인이 운영하는 농장에서 경영관리 등을 디지털 트윈 플랫폼을 활용하여 본인의 농장에 필요한 최적의 레시피를 활용할 수 있는 서비스 기능 제공이 가능하다. 그림(Fig.) 13. 디지털 트윈 기반 시뮬레이터 환경 구현 결과 (Implementation Results of Digital Twin-Based Simulator Environment) 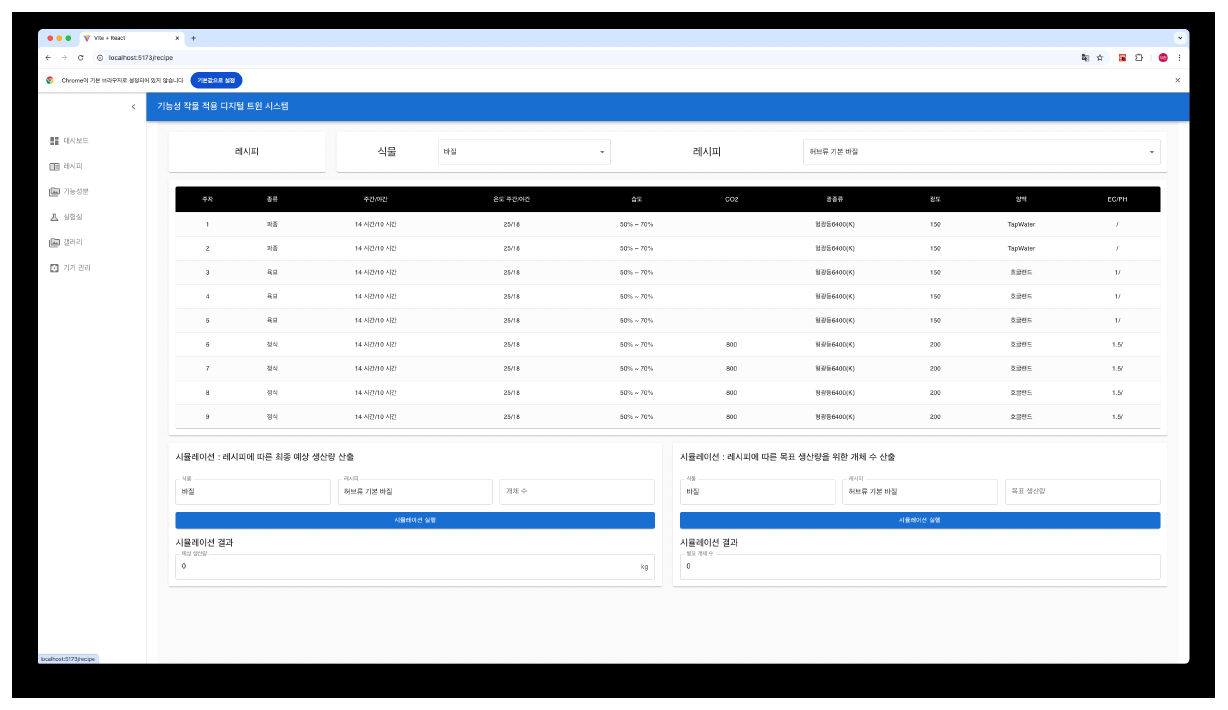 그림 14에서는 디지털 트윈 시스템을 통해 데이터가 정상적으로 수집되어 디지털 트윈 공간에 생성되는지에 대한 정확도를 판별하였다. 이를 통해 디지털 트윈 시스템과 실제 현장에서 수집되는 데이터 간의 동적 동기화 성능을 검증하였다. 실험은 2024년 10월 1일부터 10월 30일까지 약 한달간 진행되었으며, 환경은 충청남도에 소재하고 있는 E사에서 운영하는 30평 규모의 농장에서 센서를 설치한 뒤, 데이터가 실시간으로 업데이트되는지 정확도를 확인하였다. 데이터는 1분 주기로 호출되며, 한달 수집을 진행하여 목표 수집 데이터 개수는 43,200건이며, 실제 디지털 트윈 시스템에 생성된 데이터는 43,165건으로 약 99.91%의 성능이 보임을 알 수 있었다. 이를 통해 디지털 트윈 시스템의 동기화 성능에 대하여 검증할 수 있었다. 그림(Fig.) 14. 디지털 트윈 시스템의 실시간 객체 생성 정확도를 통한 동적 업데이트 성능 규명 (The Determining Dynamic Update Performance by Real-Time Object Generation Accuracy of Digital Twin Systems) 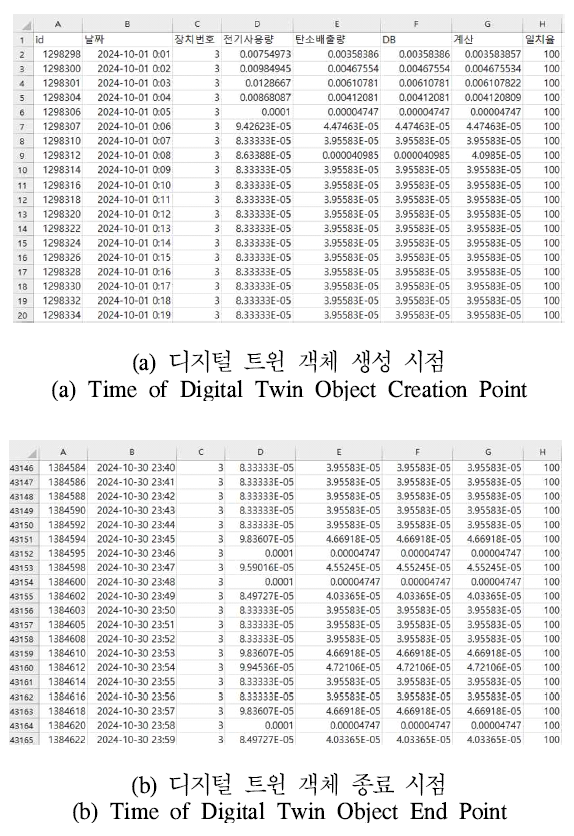 그림 15에서는 이를 통해 구현된 디지털 트윈 시스템에서의 센서 등 IoT 디바이스 생성, 관리 등을 위한 동동적 업데이트 동기화 기능에 대하여 구현하였다. 그림(Fig.) 15. 디지털 트윈 시스템을 이용한 동적 객체 생성 및 관리 화면 구현 화면 (The Dynamic object creation and management screen implementation using digital twin systems) 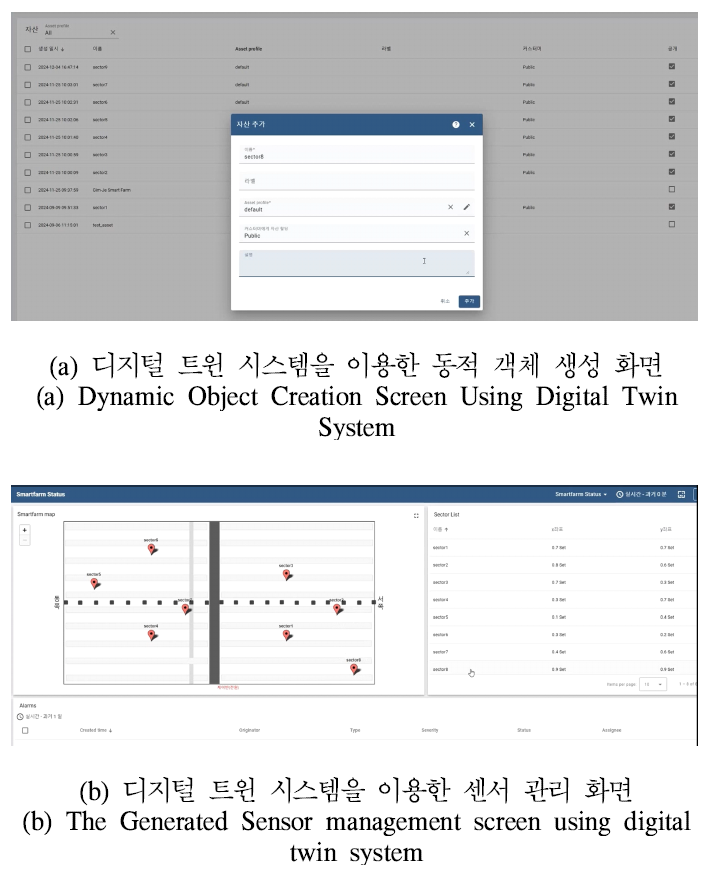 그림 17에서는 실환경(실증 테스트베드)에서 카메라 제어를 통해 실시간으로 디지털 트윈 시스템 공간 내 생성된 재배공간 화면 제어 기능을 구현한 결과를 표현하였다. 디지털 트윈 시스템 내부에 생성된 가상환경 식물공장을 웹 내부에서 키보드, 마우스 등 인터페이스로 제어하도록 설정하였다. 이를 통해 실제 현장에 오퍼레이터가 방문하지 않더라도 디지털 트윈 시스템을 이용하여 손쉽게 작물 재배 현황 등을 확인할 수 있도록 기능을 구현하였다. Ⅳ. 결 론본 연구는 수직공장을 가상의 환경에서 관리할 수 있는 시스템 개발을 위한 디지털 트윈 아키텍처를 제안하고 이를 실제 농가에 적용한 사례에 관하여 기술하였다. 디지털 트윈 시스템은 실시간 동기화, 모델 및 시뮬레이션이 입체적으로 표현되어야 하며, 재현성 확보가 매우 중요하다. 본 논문에서는 이를 고려하여 디지털 트윈 아키텍처를 Physical Layer, Interaction Layer, Digital Twin System Layer 및 Application Layer로 세분화하고 각 Layer 간 기능에 대하여 상세히 기술하였다. 재배 작물은 엽채류중 하나인 바질을 재배하였으며 이를 3D로 모델링하고 이를 입체적으로 표현하기 위해 물리 충돌 처리 컴포넌트, Particle, Prefab 등 기능을 모델에 적용하였다. Interaction Layer의 실시간 상호작용 기능을 구현하기 위해 1) PLC Controller를 이용한 제어시스템 연동과 2) 이동식, 고정식 카메라를 이용한 생육 주차별 작물 측정이 가능하도록 시스템을 구현하였으며, 3) 시스템이 새롭게 설치 및 정보가 갱신될 때 이를 실시간 조회 및 동기화가 가능하도록 동적 시스템 기술을 적용하였다. 이렇게 설계된 시스템은 충청남도에 소재한 업체에서 운영하는 30평 내외의 테스트베드 환경에서 실증을 진행하였다. 재배 작물에 대한 재배 환경 모니터링 및 제어 기능을 통합 운영관리하기 위한 기능을 본 시스템에서 제공하였으며, 실증을 통해 그 성능을 검증하였다. 향후 연구로는 작물 생육모델에 대한 동적 기능을 강화 방법에 관해 연구할 계획이다. 디지털 트윈 기술을 다양한 조건의 재배환경에 적용하기 위해서는 정확한 생육모델을 구현하고 이를 실시간으로 시뮬레이션하여 실 환경에서의 복잡한 매개변수 입력으로 현재의 생육 및 품질지표를 정확히 분석, 그 추세를 실시간 제공해 주기 위한 기술에 관하여 연구할 계획이며, 이를 위해 목표 대비 정확도를 높이는 방안에 대하여 심층적으로 연구할 계획이다. 또한 엽채류의 경우 밀식재배에 따라 발생할 수 있는 잎, 또는 과실 간 가려짐 현상 해결이 가능한 AI 기반의 인식 기술과, 이를 가려짐 영역 없이 전방위 방향으로 정확히 3D 모델로 생성할 수 있는 그래픽스 처리 기반의 재현성 확보 기술에 관하여도 연구할 계획이다. BiographyBiographyBiographyReferences
|
StatisticsCite this articleIEEE StyleD. Noh, H. Lee, T. Ko, "Implementation of a Digital Twin System for Synchronization Between Cyber and Physical Smart Farms," The Journal of Korean Institute of Communications and Information Sciences, vol. 50, no. 8, pp. 1323-1330, 2025. DOI: 10.7840/kics.2025.50.8.1323.
ACM Style Donghee Noh, Hea-Min Lee, and Tae-Hwan Ko. 2025. Implementation of a Digital Twin System for Synchronization Between Cyber and Physical Smart Farms. The Journal of Korean Institute of Communications and Information Sciences, 50, 8, (2025), 1323-1330. DOI: 10.7840/kics.2025.50.8.1323.
KICS Style Donghee Noh, Hea-Min Lee, Tae-Hwan Ko, "Implementation of a Digital Twin System for Synchronization Between Cyber and Physical Smart Farms," The Journal of Korean Institute of Communications and Information Sciences, vol. 50, no. 8, pp. 1323-1330, 8. 2025. (https://doi.org/10.7840/kics.2025.50.8.1323)
|