IndexFiguresTables |
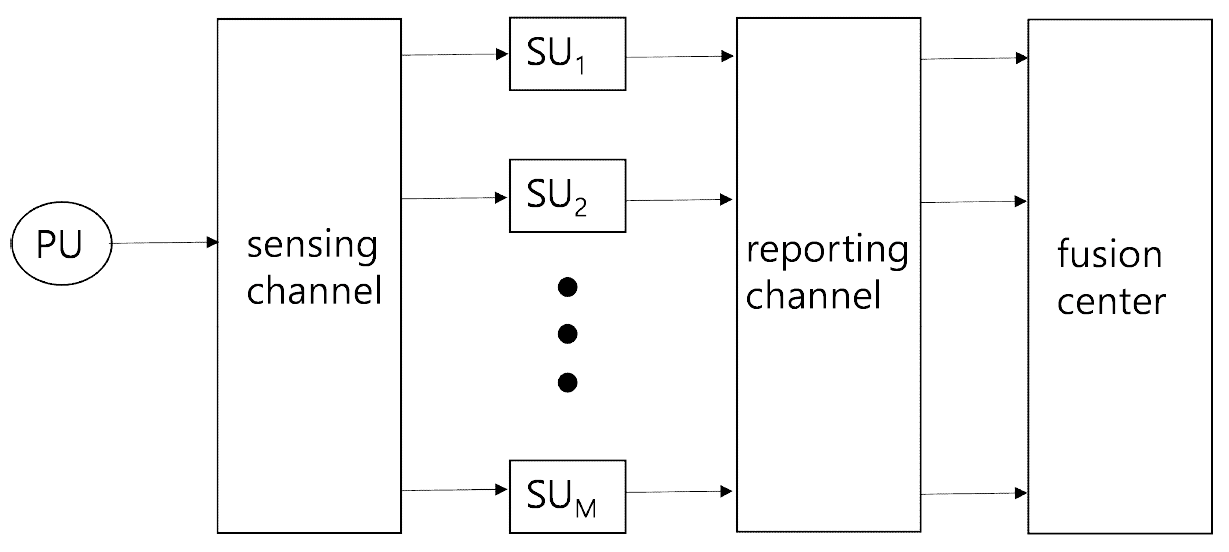
Chang Heon Lim♦°, Dong-Hun Kang*, Ga-young Choi*An Optimal Receiver for the Fusion Center in Cooperative Spectrum SensingAbstract: This letter proposes a maximum a posteriori probability( MAP)-based receiver for detecting the local hard sensing decisions of secondary users (SUs), which are transmitted over a reporting channel to the fusion center in a cooperative spectrum sensing system with censoring. Keywords: cognitive radio , cooperative spectrum , sensing , reporting channel , MAP 1. IntroductionAs a reliable sensing approach for spectrum sharing[1] in fading environments, cooperative spectrum sensing—in which each secondary user (SU) typically transmits its local sensing decision regarding the presence of a primary user (PU) over a reporting channel to a fusion center—has been widely studied. To reduce both the bandwidth required for the reporting channel and the associated energy consumption, the censoring technique[2] allows SUs to transmit their sensing decisions only when specific conditions, such as the reliability of the local decision, are met. To date, most research efforts[3] have assumed that the BPSK modulation scheme is employed to transmit the local hard sensing decisions of SUs over the reporting channel. However, these works did not exploit prior probabilities for the presence of a PU, the absence of a PU and censoring at each SU when detecting the transmitted decisions at the fusion center. Motivated by this, this letter proposes an MAP-based reception scheme that leverages these prior probabilities to achieve lower reception error at the fusion center and evaluates the sensing performance of the cooperative spectrum sensing using the proposed receiving scheme. Furthermore, our work extends the performance analysis of [2] which assumes a perfect transmission of the censoring information by incorporating transmission errors for all possible local sensing decisions. Ⅱ. System ModelThe cooperative spectrum sensing system considered in this paper consists of M SUs and a fusion center, as illustrated in Figure 1. Both the sensing and reporting channels are supposed to experience Rayleigh fading. Each SU is assumed to employ energy detection for spectrum sensing and adopt the censoring functionality with two detection thresholds [TeX:] $$\lambda_1 \text{ and } \lambda_2.$$ Specifically, when the sensed energy falls within a predefined censoring interval [TeX:] $$\left[\lambda_1, \lambda_2\right]$$, the SU withholds its local decision which is referred to as censoring. If the sensing energy exceeds the upper threshold [TeX:] $$\lambda_2$$, the SU decides on the presence of a PU; if it falls below the lower threshold [TeX:] $$\lambda_1$$, the SU concludes that the PU is absent. Ⅲ. Proposed Receiver SchemeAt the fusion center, the final spectrum sensing decision is made by first collecting the local decisions from each SU, and then applying a predefined fusion rule. Let [TeX:] $$m_i$$ denote the local decision made by the ith SU. It is assumed that [TeX:] $$m_i=1$$ indicates that the PU is present, while [TeX:] $$m_i=0$$ indicates that the PU is absent. The ith SU transmits its local decision using corresponding BPSK symbol [TeX:] $$s_i$$
where [TeX:] $$E_b$$ denote the energy of a BPSK symbol. If an SU chooses to withhold its sensing decision, its decision is set to [TeX:] $$m_i=0.5$$ which leads to [TeX:] $$s_i=0,$$ indicating that no transmission occurs. We denote the three possible cases [TeX:] $$m_i=1, \quad m_i=0, \text{ and } m_i=0.5$$ as hypotheses [TeX:] $$H_{i, 0}^{\prime}, \quad H_{i, 1}^{\prime}, \quad H_{i, 2}^{\prime},$$ respectively. Let [TeX:] $$h_i$$ represent the channel gain of the reporting channel between the ith SU and the fusion center. Then, the signal [TeX:] $$r_i$$ received at the fusion center from the ith SU can be expressed as:
where [TeX:] $$n_i$$ represents the additive white Gaussian noise (AWGN) with zero mean and variance [TeX:] $$\sigma^2$$ The fusion center investigates the received signal [TeX:] $$r_i$$ to estimate the local decision [TeX:] $$m_i$$, and then applies a fusion rule to make a final decision regarding the presence or absence of the PU. Therefore, the detection problem at the fusion center is to determine which hypothesis among [TeX:] $$H_{i, 0}^{\prime}, H_{i, 1}^{\prime}, \text { and } H_{i, 2}^{\prime}$$ is the most probable. To minimize the probability of detection error, we adopt the MAP detection method which selects the hypothesis that maximizes the posterior probability [TeX:] $$\left\{P\left[H_{i, j}^{\prime} \mid r_i\right], \quad j=0,1,2\right\} .$$ Given the received signal modeled in (2), the posterior probability can be expressed as:
(3)[TeX:] $$P\left[H_{i, j}^{\prime} \mid r_i\right]=\frac{f\left(r_i \mid H_{i, j}^{\prime}\right) P\left[H_{i, j}^{\prime}\right]}{f\left(r_i\right)} \quad j=0,1,2$$where [TeX:] $$f\left(r_i \mid H_{i, j}^{\prime}\right)$$ is the conditional probability density function, defined as follows:
(4)[TeX:] $$f\left(r_i \mid H_{i, 0}^{\prime}\right) \equiv \frac{1}{\pi \sigma^2} \exp \left(-\frac{\left|r_i+h_i \sqrt{E_b}\right|^2}{\sigma^2}\right)$$
(5)[TeX:] $$f\left(r_i \mid H_{i, 1}^{\prime}\right) \equiv \frac{1}{\pi \sigma^2} \exp \left(-\frac{\left|r_i-h_i \sqrt{E_b}\right|^2}{\sigma^2}\right)$$
(6)[TeX:] $$f\left(r_i \mid H_{i, 2}^{\prime}\right) \equiv \frac{1}{\pi \sigma^2} \exp \left(-\frac{\left|r_i\right|^2}{\sigma^2}\right)$$Let the presence and absence of a PU be represented by hypotheses [TeX:] $$H_1 \text { and } H_0,$$ respectively. Also we define [TeX:] $$\Delta_{i, 0} \text { and } \Delta_{i, 1}$$ as the probabilities that the ith SU censors its decision under [TeX:] $$H_1 \text { and } H_0,$$ respectively. Let [TeX:] $$P_{D, S U_i} \text { and } P_{F A, S U_i}$$ denote the probability of detection and false alarm probability for the ith SU. Then, the prior probability [TeX:] $$\left\{P\left[H_{i, j}^{\prime}\right], \quad j=0,1,2\right\}$$ in (3) are given by
(7)[TeX:] $$\begin{aligned} P\left[H_{i, 0}^{\prime}\right] \equiv & \left(1-\Delta_{i, 0}\right) P\left[H_0\right]\left(1-P_{F A, S U_i}\right) \\ & +\left(1-\Delta_{i, 1}\right) P\left[H_1\right]\left(1-P_{D, S U_i}\right) \end{aligned}$$
(8)[TeX:] $$\begin{aligned} P\left[H_{i, 1}^{\prime}\right]= & \left(1-\Delta_{i, 0}\right) P\left[H_0\right] P_{F A, S U_i} \\ & +\left(1-\Delta_{i, 1}\right) P\left[H_1\right] P_{D, S U_i} \end{aligned}$$
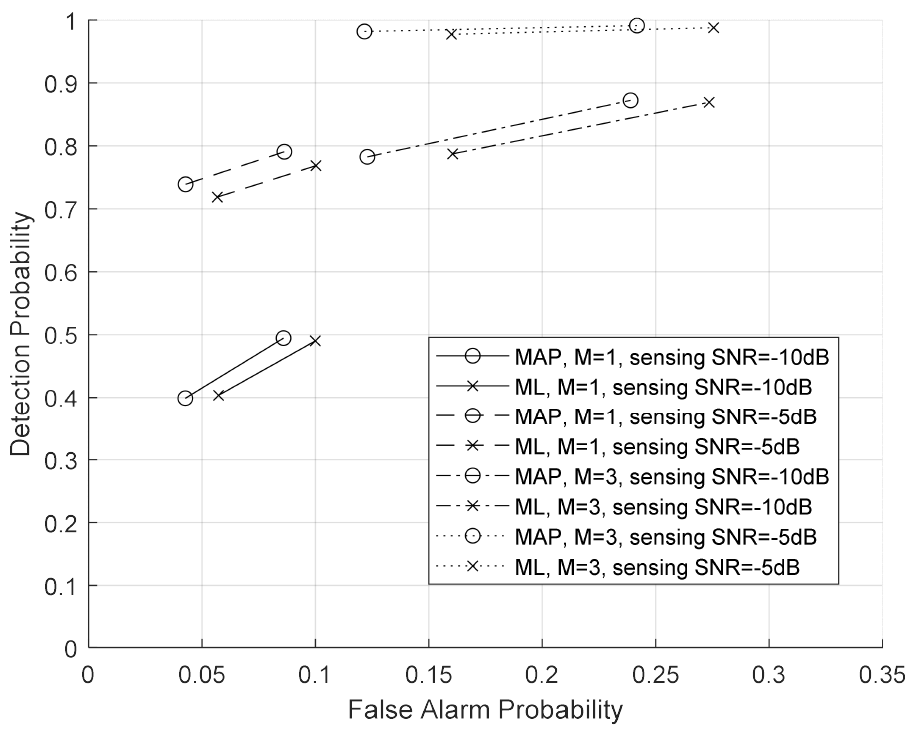
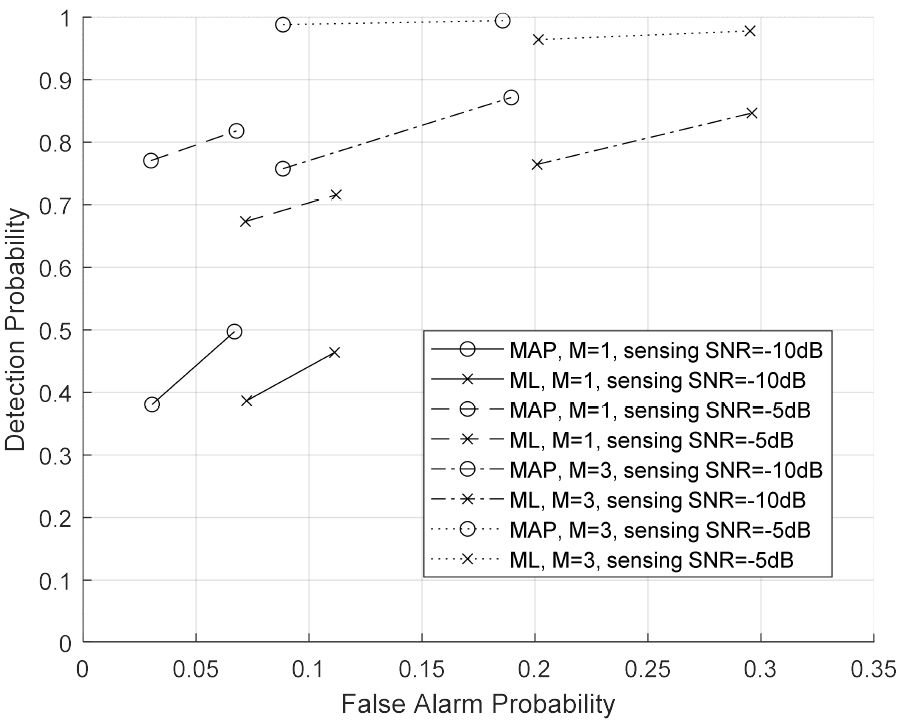
(9)[TeX:] $$P\left[H_{i, 2}^{\prime}\right] \equiv \Delta_{i, 0} P\left[H_0\right]+\Delta_{i, 1} P\left[H_1\right]$$As shown in (3), the MAP-based detection selects the hypothesis that maximizes the numerator [TeX:] $$f\left(r_i \mid H_{i, j}^{\prime}\right) P\left[H_{i, j}^{\prime}\right]$$ since the denominator is common to all hypotheses. In particular, when the hypotheses are equiprobable, the detection reduces to the ML based approach. Ⅳ. ResultsThe number of SUs M participating in cooperative spectrum sensing is set to either 1 or 3. Each SU is assumed to set its detection threshold according to the target false alarm probabilities of 0.05 and 0.1, and [TeX:] $$\Delta_{i, 0}$$ is set to 0.02. The signal-to-noise ratio (SNR) of the sensing channel is considered to be –10 dB and –5 dB, while the SNR of the reporting channel is set to 10 dB and 5 dB. The fusion rule adopted at the fusion center is assumed to be the OR rule which declares the presence of a PU when at least one of its inputs decides on that. Figure 2 shows the receiver operating characteristic (ROC) curves which illustrate the relationship between the false alarm probability and detection probability when the reporting channel SNR is 10 dB. It compares the spectrum sensing performance of the cooperative spectrum sensing with the MAP-based and ML-based reception schemes. When M=1, the false alarm probability closely approximates the target value. It is also observed that increasing the sensing channel SNR from –10 dB to –5 dB leads to an improvement in the detection probability. Additionally, when M increases to 3, both the false alarm and detection probabilities increase, which is due to the use of the OR fusion rule at the fusion center. Figure 3 evaluates the sensing performance as in Figure 2, except that the reporting channel SNR is reduced to 5 dB. It reveals that the performance gap between the MAP- and ML- reception schemes becomes more pronounced under degraded reporting channel conditions, which can be attributed to the MAP-based receiver’s ability to exploit the prior information. References
|
StatisticsCite this articleIEEE StyleC. H. Lim, D. Kang, G. Choi, "An Optimal Receiver for the Fusion Center in Cooperative Spectrum Sensing," The Journal of Korean Institute of Communications and Information Sciences, vol. 51, no. 1, pp. 125-127, 2026. DOI: 10.7840/kics.2026.51.1.125.
ACM Style Chang Heon Lim, Dong-Hun Kang, and Ga-young Choi. 2026. An Optimal Receiver for the Fusion Center in Cooperative Spectrum Sensing. The Journal of Korean Institute of Communications and Information Sciences, 51, 1, (2026), 125-127. DOI: 10.7840/kics.2026.51.1.125.
KICS Style Chang Heon Lim, Dong-Hun Kang, Ga-young Choi, "An Optimal Receiver for the Fusion Center in Cooperative Spectrum Sensing," The Journal of Korean Institute of Communications and Information Sciences, vol. 51, no. 1, pp. 125-127, 1. 2026. (https://doi.org/10.7840/kics.2026.51.1.125)
|